")
































西門子plc編程與伺服驅(qū)動(dòng)器、脈沖控制的關(guān)系
西門子plc編程與伺服驅(qū)動(dòng)器、脈沖控制的關(guān)系在控制系統(tǒng)中的應(yīng)用是新一代工業(yè)控制器件,隨著微處理器技術(shù)的發(fā)展,西門子plc得到了迅速發(fā)展,也在很多領(lǐng)域都有應(yīng)用。下面小編就為您介紹下西門子plc編程控制系統(tǒng)應(yīng)用以及應(yīng)注意的問題,希望對(duì)您有幫助.
一、西門子plc編程控制器與伺服驅(qū)動(dòng)器和負(fù)載轉(zhuǎn)速
伺服驅(qū)動(dòng)器Pm=xxPulse/r,西門子plc發(fā)出的頻率f(puls/s),計(jì)算速度n(r/s),
1、當(dāng)伺服電機(jī)直接連接到軸時(shí),將電子齒輪比設(shè)置為分子,分母設(shè)置為N.

n=(f * N)/Pm ...........這個(gè)公式以r/s為單位查找脈沖數(shù),1s內(nèi)發(fā)送的脈沖數(shù)除以1中所需的脈沖數(shù)轉(zhuǎn)=1s。
n:加載速度為: r/s。
f:來自控制器的頻率為: pls/s。
Pm:伺服驅(qū)動(dòng)器分辨率,:脈沖/r。
2、對(duì)于類型1,可以推斷當(dāng)負(fù)載軸配備有轉(zhuǎn)盤或皮帶輪時(shí),可以計(jì)算皮帶的線速度V.

V=R *(ω)=R *2πN
將1帶入:
V=πd((f * N)/Pm)
n:加載速度為: r/s。
f:來自控制器的頻率為: pls/s。
Pm:伺服驅(qū)動(dòng)器分辨率,:脈沖/r。
3、現(xiàn)場(chǎng)可能遇到輸出扭矩不足,再加上減速機(jī),將減速比設(shè)定為K.

根據(jù)等式1,電動(dòng)機(jī)軸輸出速度n是已知的,并且可以獲得在減速齒輪之后輸出的速度n1。
N1=N/K=(F * N)/(PM * K).................. R/S
N1=N/K=(F * N * 60)/(PM * K)...............轉(zhuǎn)/分
假設(shè)n1軸帶有滑塊,我們還可以找到滑塊移動(dòng)的速度。
V=N1 * d=(F * N * d)/(PM * K)............毫米/秒
類似地,f=(V * Pm * K)/(N * D)
n:電機(jī)直接軸速度為: r/s。
N1:減速器后的速度輸出,單位為: r/s。
K:減速機(jī)減速比。
V:滑塊移動(dòng)的速度,單位為mm/s。
D:導(dǎo)螺桿導(dǎo)程,單位:mm
二 、西門子plc編程控制器輸出的脈沖與位移之間的關(guān)系
有了上面的一些內(nèi)容,讓我們?cè)儆懻撘幌拢?/span>
如下圖所示,我們知道我們的伺服驅(qū)動(dòng)器Pm=10000Pulse/r,導(dǎo)螺桿的導(dǎo)程(螺紋間距,可以理解為電機(jī)導(dǎo)線引出一個(gè)導(dǎo)程)到D,發(fā)出的脈沖數(shù)由西門子plc控制器為P,假設(shè)電子齒輪比為1。如何找到與工作臺(tái)對(duì)應(yīng)的距離S?
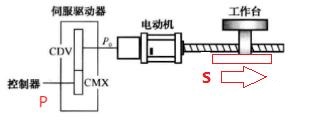
4,S=(D/Pm)* P ...首先找到一個(gè)脈沖的位移,乘以脈沖數(shù)來得到移動(dòng)的距離。如果設(shè)定電子齒輪比N,則S=(D/Pm)* P * N ....因?yàn)镻 * N是伺服驅(qū)動(dòng)器向電動(dòng)機(jī)發(fā)送的實(shí)際脈沖。
D:導(dǎo)螺桿導(dǎo)程,單位:mm
P:控制器發(fā)送的脈沖數(shù),單位:
如果是以下系統(tǒng),您如何計(jì)算移動(dòng)的距離?系統(tǒng)的機(jī)械部分配備有減速齒輪比K.

5,S=(D /(Pm * K))* P * N ......同樣的原因4找到一個(gè)脈沖的位移,由于增加了一個(gè)減速器,一個(gè)脈沖的位移被反射到負(fù)載軸小于4的頂部。可以看出,位移與齒輪結(jié)構(gòu)成反比,例如系統(tǒng)減速器,并且與伺服驅(qū)動(dòng)的電子齒輪比成比例。
根據(jù)上述公式,可以推斷出相同的原因,如果它是盤結(jié)構(gòu),則脈沖數(shù)對(duì)應(yīng)于盤旋轉(zhuǎn)的角度。
上面提到的4,5“首先找到一個(gè)脈沖的位移”實(shí)際上是傳說中的脈沖當(dāng)量δ。
三 、淺談脈沖當(dāng)量δ
從圖4中可以看出,(D/Pm)是無齒輪機(jī)的脈沖當(dāng)量,D /(Pm * K)是使用齒輪箱時(shí)系統(tǒng)的脈沖當(dāng)量。可以看出,如果確定了機(jī)械結(jié)構(gòu),則還確定該值,并確定對(duì)應(yīng)于偏差的一個(gè)脈沖的位移,即,確定系統(tǒng)的精度。例如,5mm引線的導(dǎo)螺桿直接連接到十億維伺服驅(qū)動(dòng)器,精度為5/10000mm。
總結(jié):以上就是小編根據(jù)西門子plc編程與伺服驅(qū)動(dòng)器、脈沖控制的關(guān)系在控制系統(tǒng)中的應(yīng)用及西門子plc控制系統(tǒng)應(yīng)用需注意問題的一些見解,我們?yōu)榭蛻籼峁┝可矶ㄖ频淖詣?dòng)化解決方案,西門子plc,abb plc,歐姆龍plc,組態(tài)軟件系列產(chǎn)品是專業(yè)的自動(dòng)化控制系統(tǒng)集成服務(wù)商.歡迎來電咨詢訂購(gòu)!
標(biāo)題:西門子plc編程與伺服驅(qū)動(dòng)器、脈沖控制的關(guān)系 地址:http://m.bjhtsyw.cn/gongsi/3607.html
西門子plc認(rèn)準(zhǔn)容感電氣西安西門子plc代理商")
字化工廠")

用(3)")
平臺(tái)發(fā)布")
原理說明")

介紹")

據(jù)輸入方法")
構(gòu)和各部件的作用")
內(nèi)部干擾")